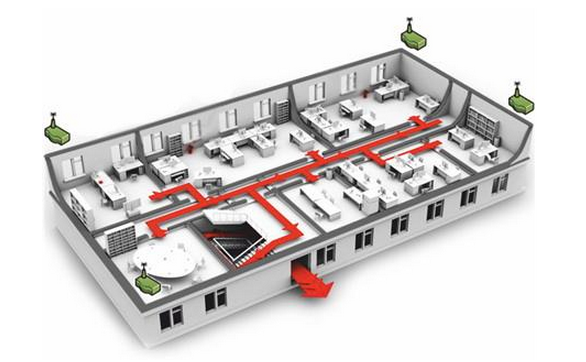
At present, common positioning technologies mainly include: Bluetooth, RFID, WIFI, ultra-wideband (UWB), ultrasonic, etc. Zhiwuda "Zhixun" ultra-wideband (UWB) positioning system is a wireless positioning technology that transmits data at a high speed in a short distance with very low power.
UWB technology
Ultra-wideband (UWB) wireless positioning technology has become the hot spot and first choice of future wireless positioning technology due to its low power consumption, good anti-multipath effect, high security, low system complexity, and especially its ability to provide very precise positioning accuracy. .
UWB technology is a kind of weak transmission power, amazing transmission rate (up to 1000Mbps or more), relatively good penetration ability, sufficient space capacity, and is a wireless technology based on extremely narrow pulses without carrier. Through these advantages, the indoor positioning is fully utilized and has a very good effect. Generally, the internal positioning of the UWB technology uses the TDOA ranging location determination algorithm, which is a radio communication system that generates, sends, receives and processes the extremely narrow pulse signal at the difference of the signal arrival time. The ultra-wideband indoor positioning system includes UWB receivers, UWB reference tags and active UWB tags. In the location determination, the UWB receiver receives the UWB signal transmitted by the tag, and obtains the signal with effective information by filtering the various noise interference during the electromagnetic wave transmission process, and then performs the distance measurement and positioning calculation analysis through the central processing unit.
Radio Frequency Identification (RFID) Technology
It is a technology that uses the principle of electromagnetic induction to activate short-range wireless tags wirelessly to achieve information reading. The radio frequency identification distance ranges from a few centimeters to more than ten meters. The typical application of RFID for personnel positioning comes from the expansion of personnel attendance systems. Compared with UWB positioning technology, RFID is mainly used to identify whether personnel exist in a certain area, and cannot be tracked in real time, and there is no standard network system for positioning applications. .
Therefore, it is not suitable for large-scale equipment inspections, personnel safety confirmation and other purposes.

WI-FI technology
The Wi-Fi positioning application adopts the placement of wireless base stations in the area. According to the signal characteristics of the Wi-Fi devices to be located, combined with the topology of the wireless base stations, the coordinates of the Wi-Fi devices to be located are comprehensively determined. Wi-Fi positioning technology facilitates the use of existing wireless devices to achieve positioning functions.
However, compared to UWB positioning, Wi-Fi has poor security, high power consumption, and spectrum resources have approached saturation. Therefore, it is not conducive to the long-term portability and large-scale application of terminal equipment.

Bluetooth technology
Bluetooth is to set the positioning by measuring the signal strength. Its existence is a kind of slow energy consumption. It is applied to the wireless transmission technology in the short-distance environment. The corresponding Bluetooth LAN access point is placed indoors. Through the adjustment of the mode, the The network configuration is set to the multi-user connection mode, and it is necessary to make sure that the Bluetooth LAN access point is always the main device of this piconet in order to achieve the effect of obtaining the user's location.
The problem with Bluetooth is that the stability of the Bluetooth system cannot keep up, and it is easy to be interfered in a complex environment, especially the sound, other signals, and the price of Bluetooth devices have always been considered.
Ultrasonic positioning technology
The reflection type ranging method is the most commonly used method for ultrasonic positioning. The system consists of a main rangefinder and multiple electronic tags. The main rangefinder is generally arranged on the body of the mobile robot, and each electronic tag is relatively fixed and arranged in a fixed position in the indoor space. The positioning process is as follows: First, the host computer sends a signal of the same frequency to each electronic tag, and the electronic tag is received and then reflected and transmitted to the main rangefinder, so that the distance between each electronic tag and the main rangefinder can be determined, and get Positioning coordinates.
In contrast, ultrasonic waves are attenuated significantly during transmission, which affects the effective range of positioning.

Below, a table is used for intuitive comparison.

Wuxi Lerin New Energy Technology Co.,Ltd. , https://www.lerin-tech.com