Introduction
This article refers to the address: http://
For a long time, many large car manufacturers have adopted a solution to centrally control all nodes of the car. These centrally controlled nodes are responsible for providing interfaces and controls for several user operations such as window lift, door lock and mirror position adjustment.
In the past, these centrally controlled nodes were based on high-performance MCUs, which were responsible for handling the various functions in the module.
Modules are usually connected via the CAN bus, and the method is now implemented in a large number of automotive platforms. Although this method can solve a large number of networking problems, it also leads to the infrastructure is too complex and the rate requirements are too high.
The development trend of the automotive industry continues to place more demands on manufacturers. Innovation and functional enhancement have always been the drivers of competitive markets: it has become increasingly difficult to implement these features on existing platforms.
Enhancing the MCU function of each centralized control node is one way to solve the problem. However, problems such as increased MCU specifications, increased number of interconnects, and lack of flexibility ultimately lead to reduced efficiency.
Another way is to reduce the integration of centralized control and port some of the functionality to smaller, more reliable nodes. The Local Interconnect Network (LIN) is the ideal network for this purpose, providing a low-cost, low-cost implementation.
This article will take a local interconnect network as an example to highlight these simplified networks. Several LIN network scenarios will be discussed and the advantages and disadvantages of each solution will be compared.
LIN Overview
The LIN bus is a car serial protocol developed for low cost applications. It complements the existing CAN network and supports a layered network within the car. This protocol is a simple master/slave configuration, and the main process is done on the primary node. In order to reduce costs, the slave node should be as simple as possible.
The LIN bus is a master-slave protocol, and all data transfers in the bus are initiated by the master node. There are now two completely different ways to transfer data to a slave node, ie master-slave transmission (transfer data from a task in the master node) or slave-to-transport (the master node transmits the frame header and transmits data from a slave node). And then the data is received by another slave node). These two methods have different strengths and weaknesses.
Information transmission timing using the LIN protocol is predictable. The protocol is time-triggered and does not require bus arbitration. It can also calculate the timing of each information frame in the worst environment. The transmission of each information frame is controlled by a schedule executed on the primary node. The schedule transmits the information frame header at a given time.
Network implementation
This section focuses on various aspects of a single LIN network, multiple LIN networks, and a hybrid CAN/LIN network.
Single LIN network (multiple gate nodes)
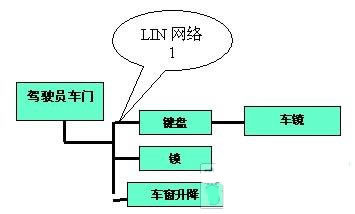
In this type of network, the Body Controller Module (BCM) will be connected to all other nodes via a single LIN network. As shown below:
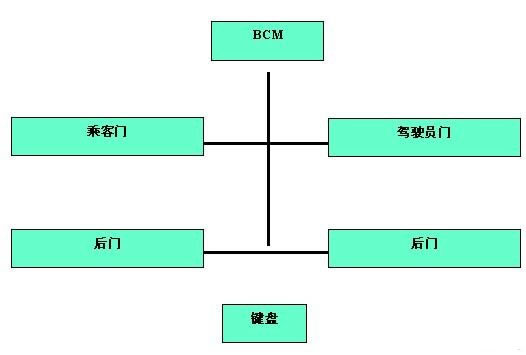
This type of network has a very direct architecture, and the LIN connection effectively replaces the CAN solution. Although the LIN protocol was originally designed to complement CAN (rather than replace CAN), the connection shown above can implement a simple LIN solution.
This is a solution that reduces costs because it does not require any CAN nodes. BCM is the master node of the LIN network, and all LIN nodes can access all the information transmitted on the LIN network. With this solution, there are usually 5 LIN nodes on the network. Reducing the number of nodes and defining the initial information transfer method make the network more direct and efficient.
However, it is more difficult to make a schedule (which defines which information will appear in the network in what order). If the system uses slave-to-slave communication, it simplifies the schedule development process and effectively minimizes network traffic. For example, if a door has any keyboard operation, then the master node needs to make a decision: any node on the network can respond within the same frame of information.
This type of network information flow is the shortest, resulting in the least EMC problems. At the same time, the reduction in flow density also helps to reduce radiation. Since all nodes are connected by a single wire, the number of connectors is minimized, which increases reliability.
Since this method has such a significant advantage, why do many manufacturers not implement the solution? The reasons are as follows: First, the complexity of each node on the network is not much different from the CAN solution. Each door node still needs to control the operation of mirrors, window lifts and door locks, and is still a solution for high-performance MCUs.
In applications where security is important, such as cars, each node should rely entirely on a "single master/single line" connection. If a car that uses this network crashes, all nodes are easily destroyed and may not respond.
In low-power applications (still in cars), the network needs to return to a low-power state frequently, when all nodes are in "sleep" mode. Although all LIN nodes can wake up the network, it may take some time for the master node to decide which node is responsible for waking up the network.
Two LIN networks (left and right)
In order to overcome the shortcomings of a single LIN network, some companies began to use dual LIN networks. The structure is as follows:
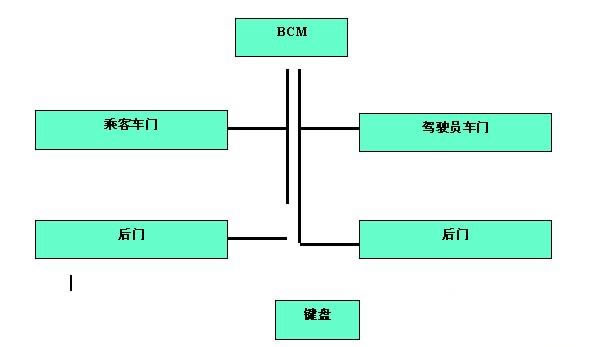
BCM controls two completely independent LIN networks, making the development of schedules relatively simple, network flexibility is enhanced, and even in the event of a crash, most networks remain intact. At the same time, two completely independent LIN networks are used, which facilitates the communication of each network on time.
However, this method still has several drawbacks. First, the intelligence of each node is not reduced, and a high-performance MCU is still needed. Second, although the definition of information has become simpler, the exchange of information between the two networks has become difficult and sometimes slow. In this configuration, although the keyboard is configured as a LIN node on the right side of the network, a large number of functions of the keyboard require left-hand network control, which causes a problem of response time delay.
CAN with LIN hierarchical structure
Just relying on LIN can't overcome all the limitations.
So, how do you apply LIN in automotive applications? We mentioned in the previous introduction that LIN is a complement to CAN, not a complete replacement for CAN. The following figure shows the solution for a CAN/LIN hybrid network:
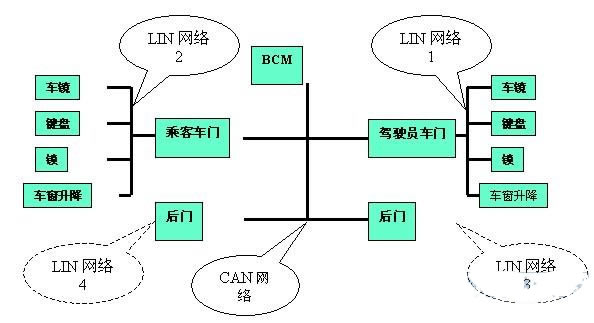
As mentioned earlier, usually the BCM and the four doors are connected via a CAN network. This is a typical solution adopted by a large number of manufacturers. At this time, the high-performance controller (MCU) in each door, such as the common Freescale HC908AZ60A, directly controls the window and the mirror.
With the LIN structure for door functions, you can choose a smaller MCU (such as the HC908GZ16), which provides enough CAN resources for BCM communication and has enough resources to control a single LIN network. In this example, the driver's door MCU is the master node of the LIN network that controls the operation of the rear view mirror, keyboard, lock, and window lift, in addition to the CAN interface of the BCM.
This will increase the MCU in the door, but if you make the right choice for the MCU and LIN state machine, you can get a more powerful and flexible distributed system.
In today's rapidly changing industry, customers demand more customized products that meet their needs, and flexibility is an important factor in achieving this demand. By introducing smaller, smaller modules into the car, automakers can quickly modify their standard product platforms to meet customer needs.
Door control
The previous example introduces a typical LIN network inside the door and also proposes a solution to the limitations mentioned above. However, there are still several problems with the door network, especially functional failures and security issues. The car mirror is the most vulnerable part of the system. It is often taken away when driving in the city, causing network disruption and even unacceptable risks for some manufacturers. In terms of safety, a large number of criminals can easily remove the mirror and obtain direct access to the driver's door MCU. This is another major risk.
There are several ways to reduce this risk. One of the methods is as follows:
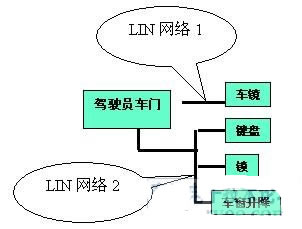
In this example, there are two LIN networks inside the door. As can be seen from the figure, the mirror is effectively isolated from the rest of the system, greatly reducing the harm caused by the removal of the mirror. Any criminal behavior can only access the driver's door MCU, but cannot access critical components such as door locks.
Another way is to control the mirror from the LIN subnode.
In this case, both safety and reliability issues can be effectively addressed. The mirror is directly controlled by the keyboard MCU or LIN node. Both methods are suitable system designs.
Typical LIN node
The picture above shows the LIN network inside the door.
Below are examples of common LIN nodes in the car.
Driver door module
In the above system, the module is the master node of the door network, providing control and timing functions for the internal LIN network of the door. It controls all LIN nodes in the door and acts as a gateway between the Body Control Module (BCM) and the local LIN network.
Rear view mirror module
Typical new rearview mirrors usually
Can support X, Y direction and folding function. The mirror module also saves detailed information such as the position of the mirror. Sometimes the driver or passenger mirror is also equipped with a temperature sensor to continuously monitor the external environment. This information is generally used as driver information or as complex engine management system information. The mirror module is usually a LIN slave node.
Window lift module
Electronic windows include rise, fall and anti-pinch controls.
The window lift node is generally a LIN slave node, and sometimes the front window module acts as both the LIN slave node of the BCM and the master node of the rear door.
Door lock module
Locking features include "standard lock" and "child lock". The LIN inside the door is directly connected to the module, which is also a prerequisite for the child lock function, so that the driver can cancel the specific door lock function. The door lock module is typically a LIN slave node.
Front switch panel
A large number of functions of the car's comfort control, such as locks, window lifts and mirror control switches, are sometimes integrated into a single module as a slave to the LIN network.
Communication method
As mentioned earlier, data communication in LIN networks mainly includes two different methods: master-slave data transmission or slave-slave data transmission. Both methods are controlled by the master node and have their own advantages and disadvantages.
Master-slave communication
The master node transmits the information ID (see Section 2), which in turn sends a data transfer command. All LIN nodes on the network convert this information and then perform the corresponding operations.
According to the master-slave communication mode, there is a slave node running inside the master node. It responds to the correct ID and then transfers the specified bits to the LIN bus. Different LIN nodes have complete LIN frames in the network, and also provide master node data and processes according to their respective applications.
For example, the master node may want all door locks to be open, such that each door lock node is set to respond to a single message and then unlock it; or the master node may transmit four different messages and then selectively open the door lock.
The master-slave communication mode transfers most of the scheduling operations to the master node, simplifying other node operations. As a result, LIN slave node hardware is significantly reduced and may even be reduced to a single state device. Another advantage is that since the primary node is able to communicate with all nodes at the same time, the number of messages and required IDs is greatly reduced.
The master node sends all data traffic to all nodes (and then receives the data from the node before all data is transferred to other devices) so that the validity of the transmitted data can be checked. This operation allows the primary node to monitor all communications, reducing and eliminating potential errors.
However, this method of communication is slow. At this time, it is difficult for the LIN node to receive and process data in time and selectively transmit it to other nodes.
From-communication
The master node also sends the information frame header. However, in the slave-to-slave mode, the response "from the task" is a remote node, such as a keyboard. When the keyboard "fills up" the information frame data bytes, all nodes on the network can see the entire transmission process and respond to the corresponding operation. In this example, the window LIN slave node responds to the keyboard LIN node data.
The slave-to-slave communication method is faster than the master-slave communication. The nodes on each information frame share information, which greatly improves the response speed. A single message can open two windows, close one door, open three doors or move the window. This can significantly reduce data traffic on the network.
However, the slave-to-slave communication method has important limitations: First, the clock source of each slave node is unknown, so when the slave node transmits data to the network (according to the master node request), the data may drift. The master node has a very accurate clock, and the data drift has a large error range, but the other LIN slave node that accepts the data does not, which leads to data mistranslation. Second, in this case, the master node does not display "slave-from" communication has expired.
Data transfer rate
Information frame transmission duration
The following table describes the maximum duration of 2, 4, and 8 bytes of information at 600 bit/sec and 19200 bit/sec. This protocol is dedicated to operation between 1 kbps and 20 kbps and is recommended for use in the LIN specification.

These data may appear to be very slow (especially when compared to CAN), but there are many reasons for this, and the two main reasons are to minimize EMC emissions and simplify slave nodes.
in conclusion
As some of the intelligent control functions of the car move to the smallest nodes, there is an increasing demand for small and reliable microprocessors that meet such requirements.
The LIN network solution makes the interconnection between a large number of nodes simple and cost-effective, so it is an ideal solution. At the same time, system designers should also consider a number of other factors when designing.
19 Inch Cable Management Frame
Cable Management refers to an important step during the installation of building services (i.e. electrical services) and the subsequent installation of equipment providing means to tidily secure electrical, data, and other cables.
Our factory has already kept over 20 types Cable Management Frame in our catalogue for your selection. Mainly Cable Ring Manager for 19" size also offer 10" with 3 rings. You can choose Horizontal Wire Management Panel or vertical wire management panel in 1U and 2U.For different function, you can refer to with cover or not even with brush or not.

Cable management frame also called cable organizer or Cable Organizer, it is easy to install or uninstall. You can change the quantity and location as you like. It makes your network cables orderly, easy and effective.
Network Cable Management, Computer Cable Management, Rack Cable Management
NINGBO YULIANG TELECOM MUNICATIONS EQUIPMENT CO.,LTD. , https://www.yltelecom.com