Due to its compact size, low price and stable operation, the stepping motor is widely used in the low-end industry. The stepping motor motion control realizes full-closed loop, which is a big problem in the industrial control industry.
There are two main problems, the uncertainty of the origin and the out-of-step. At present, the high-speed photoelectric switch is used as the origin of the stepping system. This error is in the millimeter range, so it is unacceptable in the field of precision control. In addition, in order to improve the running accuracy, the stepping motor system is driven by multiple subdivisions, and some are larger than 16. If used in the reciprocating motion, the error is astonishing. Can not adapt to the field of processing.
To this end, a stepper motor full-closed loop control system is proposed to meet the needs of the current motion control field.
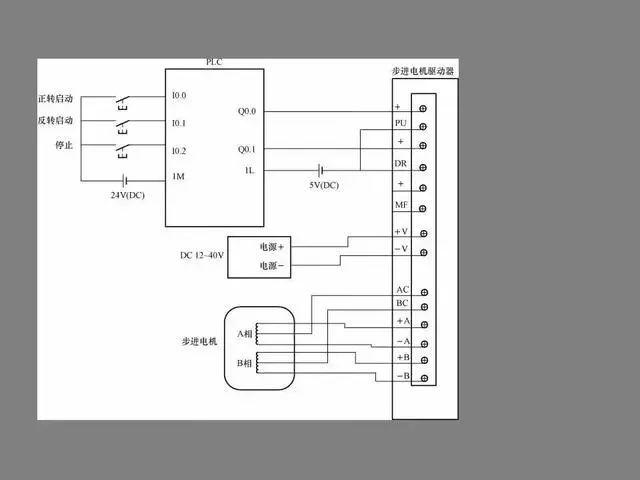
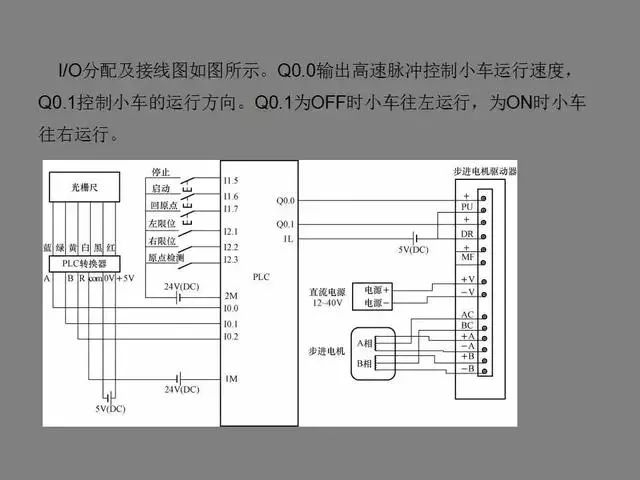
1, hardware connection
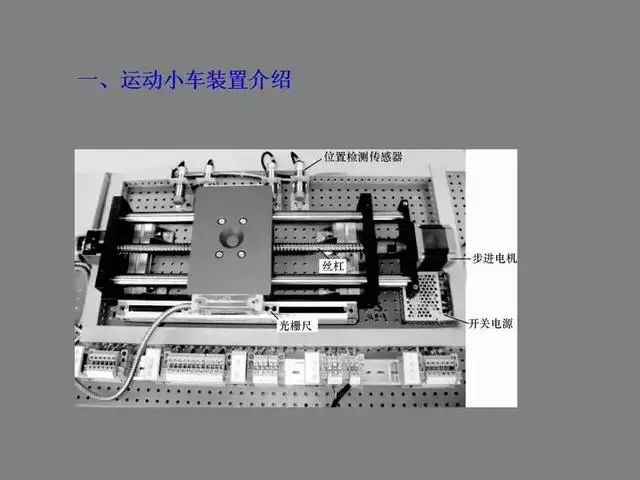
The hardware connection is equipped with an encoder, and according to the subdivision requirements, different levels of resolution encoders are used for real-time feedback.
2, origin control
According to the Z signal of the encoder, the coordinate origin is identified and calculated, which is the same as the numerical control system, and the precision can reach 2/encoder resolution×4.
3, out of step control
According to the feedback data of the encoder, the output pulse is adjusted in real time, and according to the degree of out-of-step adjustment, a corresponding method is adopted.